Numerical results
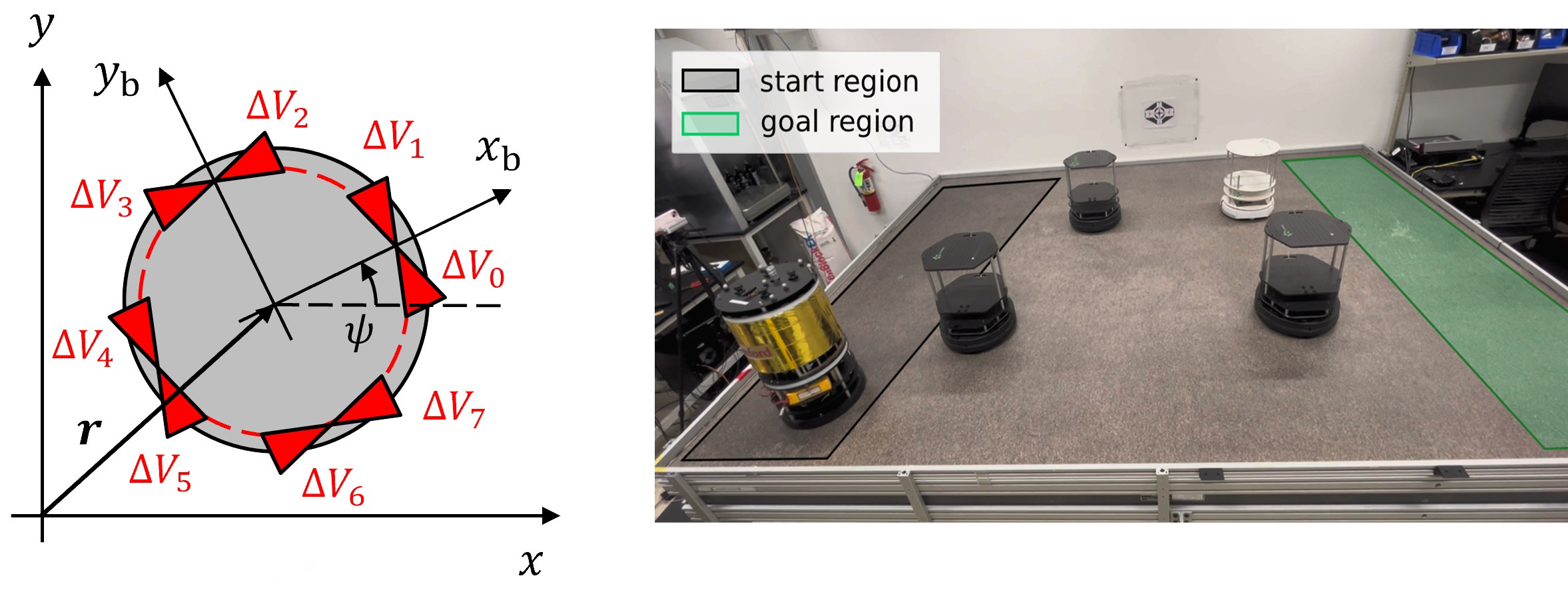
The generalization capabilities of the Autonomous Rendezvous Transformer (ART) are evaluated in simulations and on a Free-Flyer testbed:
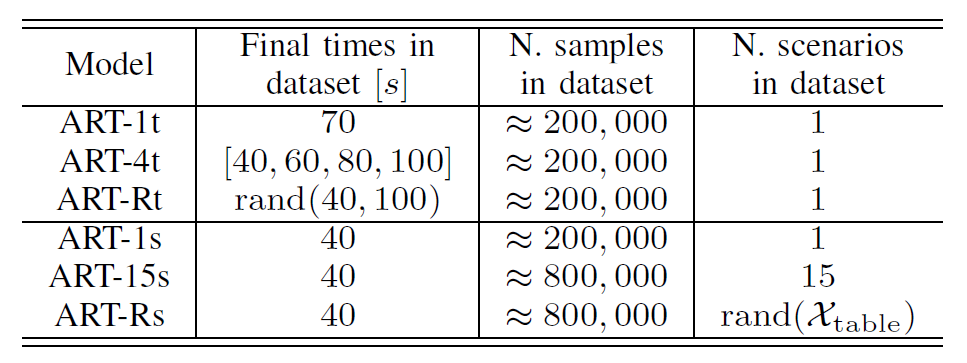
- By varying the final time constraint of the optimization problem,
- By varying the operative scenario and the obstacles' configration.
Ablation studies are conducted to assess the impact of diversity in the training dataset on the learning process of ART.
Results relative to ART generalization capabilities with novel target time acquisition constraints.

Results relative to ART generalization capabilities with novel obstacles' configurations and avoidance constraints.

While dataset diversity generally improves generalization performance, excessive diversity may have negative effects depending on the specific application. Specifically, for the final time generalization, it results in an imprecise warm-start and a higher number of SCP iterations to converge to the final solution.

